
MIT's Mighty Morphing Bots Set to Stretch and Squeeze into the Future!
Scientists at the Massachusetts Institute of Technology are pioneering a new frontier in robotics, one that doesn't rely on rigid structures and predefined shapes. According to recent findings published by MIT News, these researchers have developed an algorithm that could one day enable soft robots to contort, stretch, and reshape themselves to perform a variety of tasks, such as sliding through tight spaces or reaching for items.
The potential for these malleable robots is vast, ranging from healthcare applications to industrial systems. MIT researchers have crafted a control algorithm capable of autonomously learning to manipulate the robot's pliable body. Unlike traditional robots which are limited to limbs and joints, these new prototypes can entirely change their morphology, to overcome multifaceted challenges, such as squeezing through narrow passageways or manipulating objects. "Our robot is like slime and can actually change its morphology. It is very striking that our method worked so well, because we are dealing with something very new," Boyuan Chen, an electrical engineering and computer science graduate student and co-author of the study, told MIT News.
To address the complexity of controlling such a robot, the team approached the problem with a coarse-to-fine strategy using reinforcement learning, a machine-learning method that rewards the robot for actions that move it towards a goal. The algorithm initially learns to control clusters of adjacent 'muscles' and then refines its control for more precise movements. Vincent Sitzmann, assistant professor of EECS at MIT, explained, "Coarse-to-fine means that when you take a random action, that random action is likely to make a difference. The change in the outcome is likely very significant, because you coarsely control several muscles at the same time."
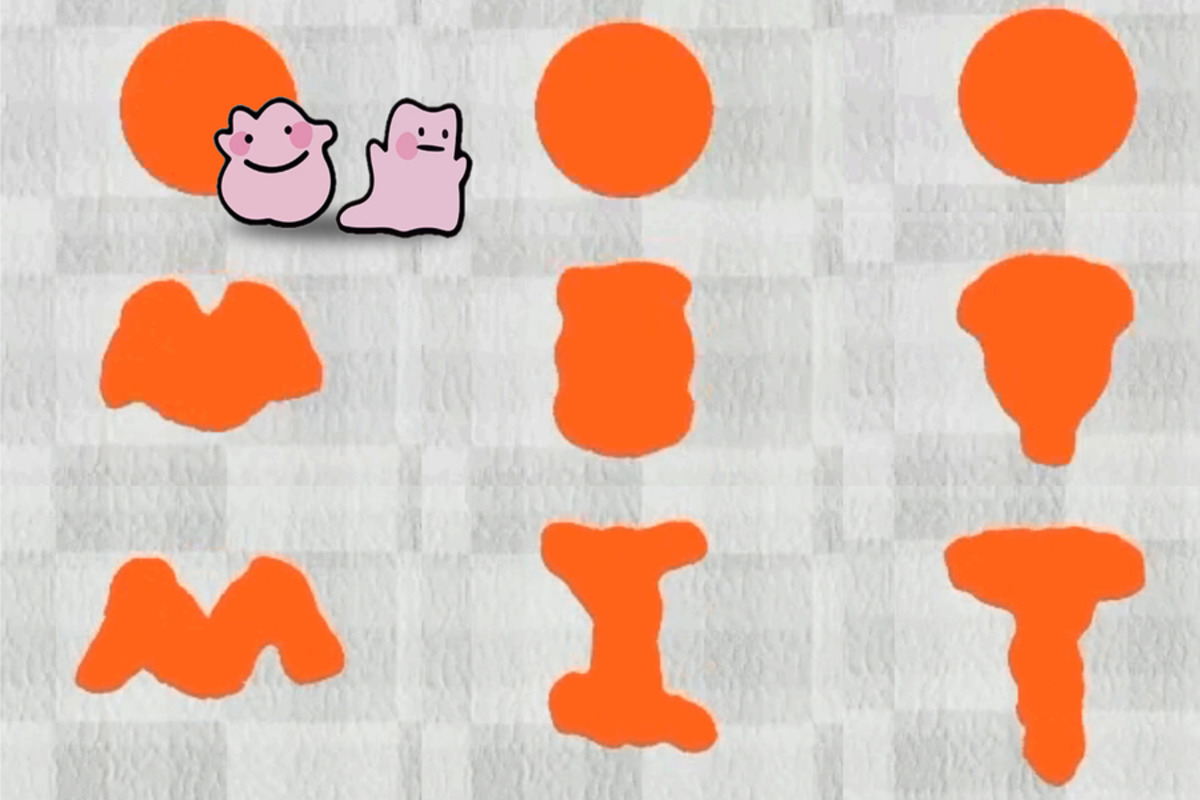
Part of the methodology was developing a simulator named DittoGym to test their control algorithm. Here, the soft robot underwent various challenges, such as weaving through obstacles or morphing into letters of the alphabet. Suning Huang, the lead author and an undergraduate student from Tsinghua University who worked on the project while visiting MIT, described the purpose behind DittoGym's tasks. "Each task is designed to represent certain properties that we deem important, such as the capability to navigate through long-horizon explorations, the ability to analyze the environment and interact with external objects," Huang said. The algorithm succeeded in all eight tasks, signaling a significant advancement in the realm of reconfigurable robots.
Welcome to Billionaire Club Co LLC, your gateway to a brand-new social media experience! Sign up today and dive into over 10,000 fresh daily articles and videos curated just for your enjoyment. Enjoy the ad free experience, unlimited content interactions, and get that coveted blue check verification—all for just $1 a month!
Account Frozen
Your account is frozen. You can still view content but cannot interact with it.
Please go to your settings to update your account status.
Open Profile Settings